-
![高天的头像]()
高天在文章 i2Head for InMoov 头部组装 中发布了一条评论
注册会员后就可以下载哦
-
![高天的头像]()
高天 写了一篇新帖子
![]() 阅读全文
阅读全文本指南涵盖架构、构建选项以及ESP32‑S3(Seeed Studio XIAO ESP32S3)用于驱动Feetech HLS3606M舵机的详细通信协议规范。 概述 固件提供了一种紧凑的固定16字节二进制串行协议,用于控制七个执行器(拇指和手指)以及查询遥测数据(位置、速度、电流、温度)。它还在板上实现了归位、设置ID、持久微调和安全行为,从而使主机PC保持简单。 通道(7个): 拇指腕掌关节外展执行器 拇指腕掌关节屈曲执行器 拇指肌腱执行器 食指执行器 中指执行器 环指执行器 小指执行器 硬件与软件要求 MCU:建议使用Seeed Studio XIAO ESP32-S3(推荐8 MB闪存) 伺服电机:Feetech HLS/SC系列(例如HLS3606M),7个执行器映射ID 电源:伺服电机轨6–9 V,需具备足够电流容量;MCU通过USB-C接口提供5 V电源。我们建议为可提供高达10A电流的手部驱动使用稳定的6V电源供应。 工具:Arduino IDE或PlatformIO 快速入门 在 HandConfig.h 中选择手(左/右),或通过构建标志(见下文)进行选择。 构建与烧录: ◦ PlatformIO:选择 seeed_xiao_esp32s3 ➜ 上传 ◦ Arduino IDE:打开主草图 ➜ 将板设置为 XIAO ESP32S3 ➜ 上传 3. 首次启动:在配置的波特率(通常为 921600 或...
-
![高天的头像]()
高天 写了一篇新帖子
![]() 阅读全文
阅读全文安装并启动图形用户界面GUI 遵循软件安装中的说明 顶部栏控制 Port 端口:可用串行端口下拉菜单。若插拔设备,可使用“刷新”重新扫描。 Baud 波特率:串行通信速度。默认值921600适用于高速流传输,我们的固件也使用相同的波特率。 Connect / Disconnect 连接/断开:打开或关闭所选串行端口。 Rate 速率(Hz):移动滑块时GUI流式传输CTRL_POS帧的频率。建议:50 Hz,以实现平滑运动且不占用USB带宽。 操作按钮(从左到右) Homing 归位:发送0x01指令以执行板载归位程序。归位过程中忽略任何其他输入;在3分钟的超时时间内等待确认信号。 Set ID 设置ID:引导流程用于设置伺服的总线ID。需要连接单个伺服;固件在写入前会验证这一点。 Trim Servo 微调伺服:按通道精细调整对齐。输入通道(0-6)和角度偏移量(±)。固件会调整并持久化通道的extend_count到NVS,使其在重启后仍保留。建议使用小步长(±5-10°)并进行测试。 Upload Firmware上传固件:直接从GUI闪存.bin文件。选择后,开发板重置进入引导加载程序,写入镜像并重启设备。 Set to Extend设为展开:发送单个CTRL_POS帧,将所有通道设置为0.000(完全打开/展开姿态)。作为“紧急打开”功能非常实用。 GET_POS:请求位置信息。值以归一化形式0.000→1.000显示,通过每个通道的展开↔抓取校准(主机0..65535)计算得出。 GET_VEL:请求执行器运动的速度。 GET_CURR:请求电流(mA),带符号——符号反映电机方向相对于通道伺服方向(使用绝对值评估负载)。 GET_TEMP:从每个伺服请求温度(°C)。 GET_ALL:便捷批量读取,触发POS + VEL + CURR + TEMP的一次性读取并将结果打印到日志。 Set Speed设置速度:为选定的伺服ID设置速度限制(指令码0x31)。这会设置该伺服的最大速度;默认情况下,速度为最大值,重启后重置。此处设置的速度会影响位置控制模式下电机移动的最大速度,这与速度控制模式不同。 Set Torque设置扭矩:为选定的伺服ID设置最大扭矩限制(指令码0x32)。这会限制最大扭矩;默认情况下,扭矩为最大值,重启后重置。此处设置的扭矩会影响位置控制模式下电机可施加的最大扭矩,这与扭矩控制模式不同。 滑块面板(中心) 每一行通过一个归一化滑块控制一个单独的执行器通道: 0.000至1.000 通过2字节线性映射到通道的校准范围↔抓取范围,并作为14字节有效载荷通过CTRL_POS命令发送。 拖动时,GUI以所选速率(Hz)流式传输CTRL_POS帧。 两个小数值读数显示当前命令和(轮询时)最新的归一化反馈。 频道映射(从上到下): thumb_abduction_actuator拇指外展执行器, thumb_flex_actuator拇指屈曲执行器, thumb_tendon_actuator拇指肌腱执行器, index_finger_actuator食指执行器, middle_finger_actuator中指执行器, ring_finger_actuator无名指执行器, pinky_finger_actuator小指执行器. 状态与日志(底部) Status bar状态栏(左侧):显示连接状态(例如:已断开连接、COM12 @ 921600)、最后错误以及归位/闪烁进度消息。 RX Log接收日志:响应/遥测数据的文本控制台,可用于调试、验证操作码和查看GET_*结果。 Clear Log清除日志:清除接收日志显示(不影响设备状态)。 上传固件 要将固件上传到您的Aero Hand设备: 在图形用户界面中Refresh刷新所有端口以检测已连接的设备。 如果列出了多个端口,请识别您的ESP设备对应的端口: 在...
-
![高天的头像]()
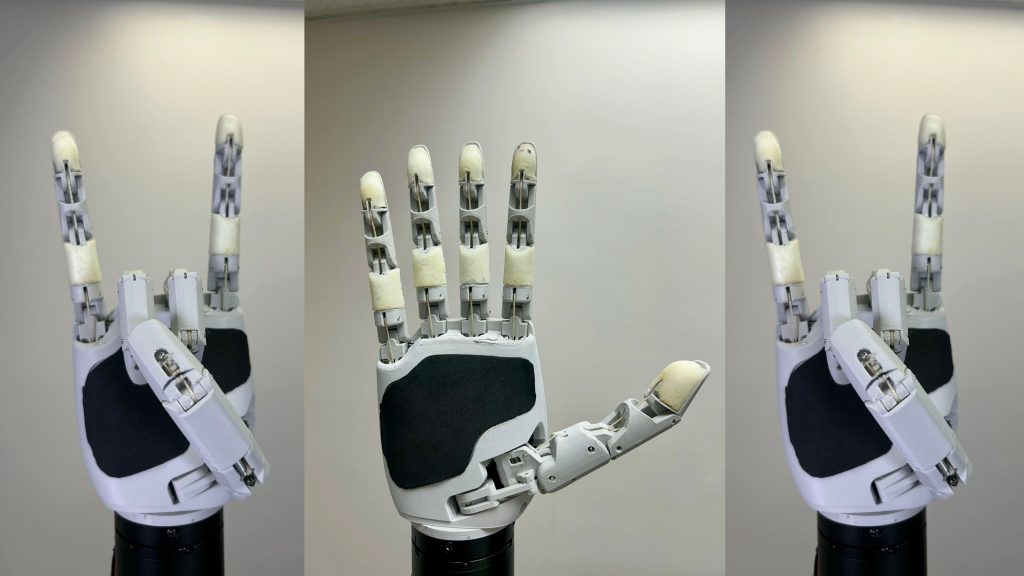
高天在文章 Aero Hand Open:低成本、开源、轻便、仿生灵巧手 中发布了一条评论
有的,淘宝店有售
-
![高天的头像]()
高天 写了一篇新帖子
- 加载更多帖子