这份配置清单是官方公布的最新版,更新时间是04/05/2016。
官方配置清单连接: https://inmoov.fr/default-hardware-map/
- 首先,您需要有一台3d打印机
- 2x arduino Mega 板,目前其实 1xUno和1x Mega 足够了,为了方便以后扩展。

沉头螺丝(M8的不用沉头)
- M3x20MM约50个
- M4x20MM约50 个
- M8x100MM约15 个

十字沉头自攻螺丝
- M3x12MM,对于小型伺服器约为100。
- M4x20MM,对于大型伺服器约为50。
还有舵机配送的螺丝就够了
手和手臂(左,右):
- 10x伺服HK15298B
- 2x伺服器MG996r
- 0.8毫米编织/钓鱼线(200LB)。线号1.2的
- 一些 螺栓 M4 M8
- 1500gr天然ABS(建议根据个人爱好配色买,比如黑白)
- 10x拉伸弹簧直径0.51mm,长度1cm(13 / 64”x13 / 16”)
手臂和肩膀(左,右):
- 8 个Hitec HS805BB (更好的扭矩和更快的速度)如果没有可以找同尺寸款式代替,现在应该是 Hitec HS805BB +
- 一些螺栓
- 1500grABS (根据个人喜好配色买)
头部和躯干:
- 2个Hitec HS805BB 头部(上/下,右/左)
- 1x伺服HK15298B下巴结构控制
- 2个伺服HK15298B颈部倾斜(1个主控,1个从属)
- 2x DS929 舵机或类似的90s、90D舵机控制眼部机制
- 1X Camera Hercules HD或1X LifeCam3000 Microsoft眼部摄像头(可以自行购买,但需要看好尺寸,也可以更改打印文件实现)
- 1X kinect xbox 360(未拆卸或参见下面的教程)
- 约4kg天然ABS
- 0.8mm编织线/钓线200LB
- 杂项螺栓
- 1500gr天然ABS
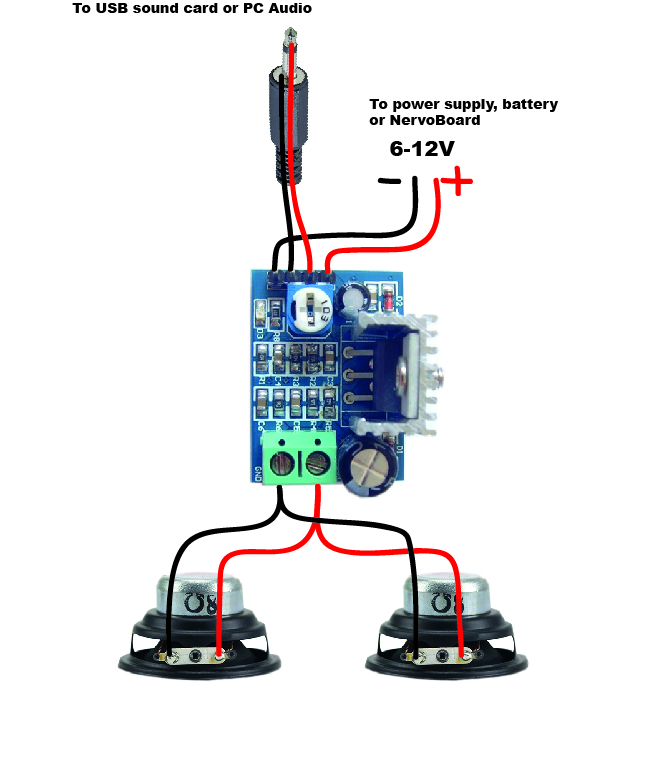
- 1个6V12AH电池+ 6V1.5A电池充电器(机器人只需要一块电池就能工作,并且充电器在使用过程中应使电池充满电。)或者,当整天运行时,我使用了eFuel开关电源6V -15V输出20Amps,但对于整个机器人来说,这还远远不够。因此,我目前正在使用6V 60Amps开关电源。()
- 2个迷你PC扬声器8欧姆10W
- 迷你功放6V
- 1xPIR传感器重新触发
- 电缆和电线

胃:
- 高胃:2倍Hitec HS805BB
- 腹部中部:2支Hitec HS805BB或HK15338
排线长度:(也可以用舵机延长线)
- 神经板到脖子———————————色带长度10cm
- 神经板到头(眼睛/颌骨)——————色带长度55cm
- 神经板到肩3xribbon ——————丝带长度35cm
- 肩扛————————————–丝带长30cm
- 肩并肩————————————-丝带长度30cm
- 肩到手指传感器————————-碳带长度30cm
- 神经板到胃—————————色带长30cm
NUC的最新配置:
- CPU:第八代Intel i7 8550四核4,0GHz
- 固态硬盘:256GB(操作系统+ Myrobotlab)
- 硬盘:500GB(仅因为我有备用硬盘)
- 内存:32GB
- 图形:Intel UHD Graphics 620
- 连接性:HDMI,Mini-DP,千兆网卡,2 * USB3.0、2 * USB2.0,
- WIFI和蓝牙:2.4G / 5G Wifi上网B / G / N / AC +蓝牙
- 尺寸:113mmx108mmx30mm
- 安装的操作系统:Windows 10 pro和Linux Ubuntu
- 平板电脑Lenovo通过热点作为屏幕连接,以无线方式控制PC(平板电脑型号Thinkpad8 2GB RAM,128GB固态硬盘,处理器1,46Ghz)
受MRL控制的已连接设备:
- 1个USB3.0集线器8个端口
- 1个Kinect ONE或Orbbec Astra(我可以在之间切换,我不建议kinect ONE)
- 2个Arduino Mega
- 2个Nervo板
- 1个Arduino Nano
- 3个NeoPixel
- 2个HC-SRC04传感器
- 1个PIR传感器
- 10个手指压力传感器
- 2个Hercules网络摄像头
- 1个USB声卡
- 1个Logitech H600无线耳机
- 2个扬声器10瓦
- 1个6V 60Amp电源,可用6V12AH电池组替换
较旧的配置:
将Lenovo Touchpad 8“平板电脑与由Powerbank 10000mAh 5V供电的8port集线器配合使用。平板电脑可以在Windows8或10下运行,并且可以配置为与Linux一起运行。这是一台真正的迷你PC。您将需要此Lenovo Tablet 的OTG + Charging专用电缆。我很难找到它,这很奇怪。Carefull其他类似平板电脑品牌的电缆将不起作用。这是我买的键盘:https :
//www.amazon.com/Keyboard-TOUCHPAD-EXECUTIVE-Bluetooth-Detachable/dp/B017HLXESO
我原本希望能够将其用于旅行,但不幸的是尺寸存在严重问题。尽管卖方假装适合8英寸平板电脑的销售盒,但实际上不可能安装平板电脑。
因此,建议您注意该问题……, 键盘工作正常,有时会失去连接,但无论如何它都会自动重新连接。
用 PowerBank+8 口 HUB USB3.0 通过USB供电的设备:
- 平板电脑联想
- Arduino的
- 相机
- 声音放大器
- Kinect
我购买了 8端口HUB USB3.0,以具有额外的端口,并且可以与OTG电缆和Lenovo Tablet配合使用。如果您不使用移动电源,则为集线器供电必须至少可提供5v4Amp的电源,这一点很重要,因为我们连接了许多USB设备,每个USB设备需要500mAh。
在使用OdroidU3和Raspi2进行了许多测试之后,我得出的结论是Arm处理器太慢,无法从相机获得正确的FPS值,这使我选择了另一种选择。
我对手部舵机选择偏爱顺序:(某宝上的舵机名称存在虚假,注意区分)
- HK15298B(20kg强劲扭矩,无噪音,永不燃烧,90度)
- HK15298(15公斤大扭矩,高噪音,永不燃烧,90度)
- MG996R(低扭矩10kg,有点吵,有时会烧成180度)
- MG946R(中等扭矩12kg,有点吵,有时会烧180度)
- MG995(低扭矩10kg,有点吵,很容易燃烧,180度)
这些是我尝试过的伺服器。还有其他符合所需尺寸规格的伺服器。所有这些伺服器都需要在软件中设置为Min,Max,因为它们的旋转角度会有所不同。InMoov手的每个手指都有不同的伸展,缩回长度。
很好的学习资料