在打印所有零件之前,应先打印CALIBRATOR,以检查零件是否可以装配在一起。如果很难将这些部件放在一起,则需要检查打印机校准设置。
填充物为30%,壁厚2.5mm,最好没有木筏,没有支撑物(除非特别说明),对大零件使用帽檐以避免翘曲。
您将需要打印所有这些部分:
- 1个DiskIntern
- 1个TStomSpacer
- 1个TStomRotFront
- 1 x TStomRotBack
- 1个TStomPotHolder
- 1 x TStomCovRight
- 1 x TStomCovLeft
- 1个TStoServoHolster
- 1 x TStoPistonRight
- 1个TStoPistonLeft
- 2 x TStoMiddle
- 1 x TStoFrontStand
- 1 x TStoFrontRight
- 1 x TStoFrontLeft
- 1 x TStoBackStandRight
- 1 x TStoBackStandLeft
- 1 x TStoBackRight
- 1 x TStoBackLeft
- 1 x StomGear
- 1 x StoGearAttach
- 1个ServoBack
- 1 x RollFrontRight
- 1 x RollFrontLeft
- 1 x RollBackRight
- 1 x RollBackLeft
- 1 x DiskUnder
- 4个DiskExtern
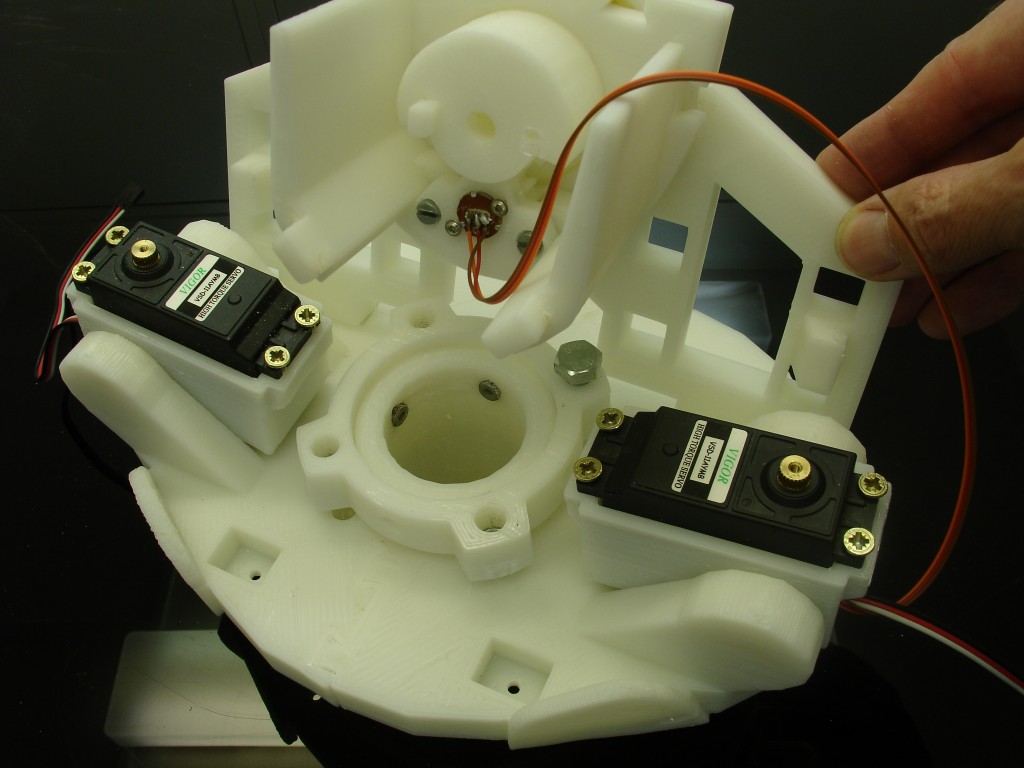
您将需要2个伺服器HS805BB,需要对其进行入侵。两个电机伺服器将仅使用一个伺服板和一个电位器,这样,两个电机在旋转时将同步。这将在tuto中进行解释。
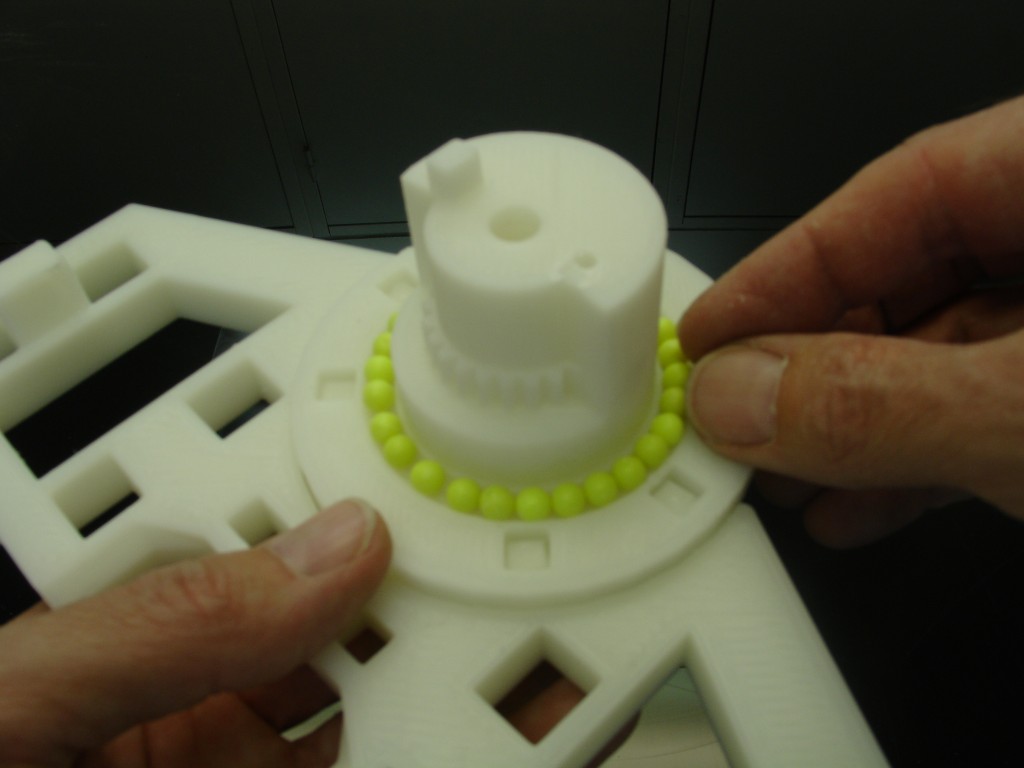
您将需要大约50至60个直径为6mm的球来创建轴承。BB枪用钢或塑料。
您也将需要(乐趣)Adafruit的 1个Neo Pixel戒指。至于现在,我正在使用一个额外的Nano Arduino开发板来控制它,但是希望可以将其实现到MRL中,并且我们能够将其连接到我们的Mega开发板上。

注册会员后 点击免费下载3D打印文件

inmoov 腰部打印文件
真棒!inmoov 其它部分的文件什么时候能更新下载啊?