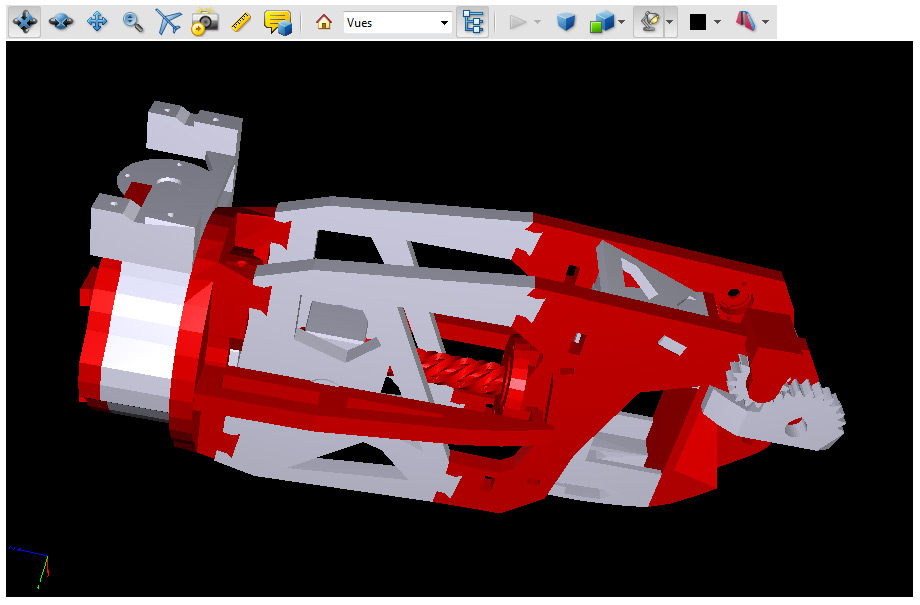
我已尽力使这一过程变得简单,希望您能在此处找到问题的答案。一旦打印了零件,就可以开始工作。在这些图片上,我正在组装左臂,因此在构建右臂时要考虑到这一点。下载STL
在打印所有零件之前,应先打印CALIBRATOR,以检查零件是否可以装配在一起。如果很难将这些部件放在一起,则需要检查打印机校准设置。
填充物为30%,壁厚2.5mm,最好没有木筏,也没有支撑,对大零件使用帽檐可避免翘曲。
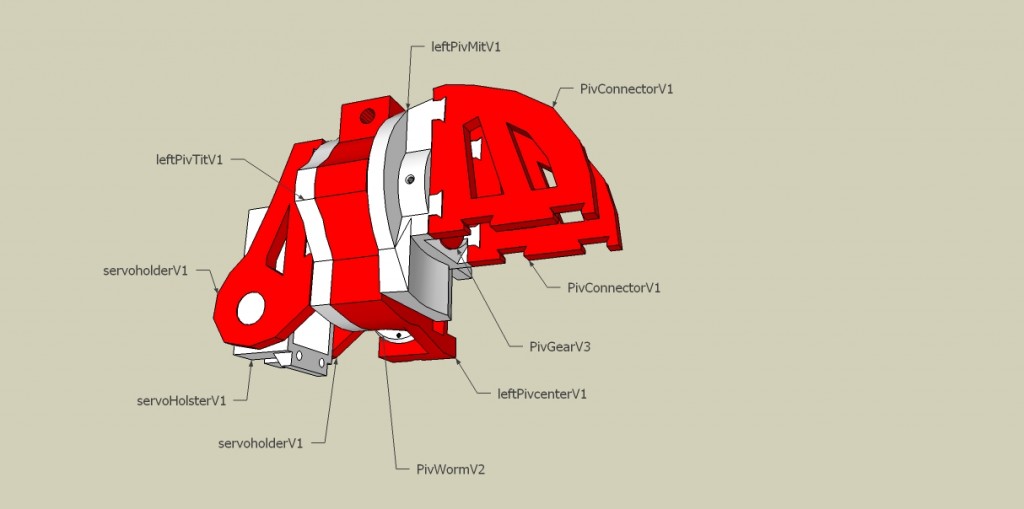
以下是零件列表和1个 右二头肌所需的打印数量:
- 1x GearHolder
- 2x HighArmSide
- 1x Pistonanticlock
- 1x Pistonbaseanti
- 1x RotGear
- 1x RotMit
- 1x RotPotentio
- 1x RotTit
- 1x RotWorm
- 1x Rotcenter
- 1x armtopcover1
- 1x armtopcover2
- 1x armtopcover3
- 1x elbowshaftgear
- 1x gearpotentio
- 2x lowarmside
- 2x reinforcer
- 1x servobase
- 1x servoholder
- 1x spacer
步骤1:
我们在第一个Tuto中要做的是提取2个伺服器的电位计,并通过焊接增加额外的电缆长度:
我们首先要拧开底部的所有螺钉,以打开Hitec HS-805BB伺服器。它分为三个部分。确保在干净的地方工作,不要丢失任何东西并破坏其中所含的油脂。拆下顶部后,记下或拍摄每个齿轮的位置照片,并检查是否有两个看起来几乎相同(如图所示)。
拆下轴承及其环(注意顺序)。卸下它可能有点困难,我在轴承下面使用了一个小螺丝刀。
现在我们要卸下pcb卡及其马达,在某些伺服器上很容易,但是马达周围有一些胶水,因此您可以通过按下位于机身顶端的小金属齿轮将马达向下推螺丝刀。
这是InMoov制造商发布的另一种解决方案,如果您不能像我那样打开伺服器,当然,如果您有焊锡泵,它将更加容易。
步骤2:
这张图片是要告诉您“ rotgearV1”相对于“ rotmitV1”的角度位置。检查小矩形孔。
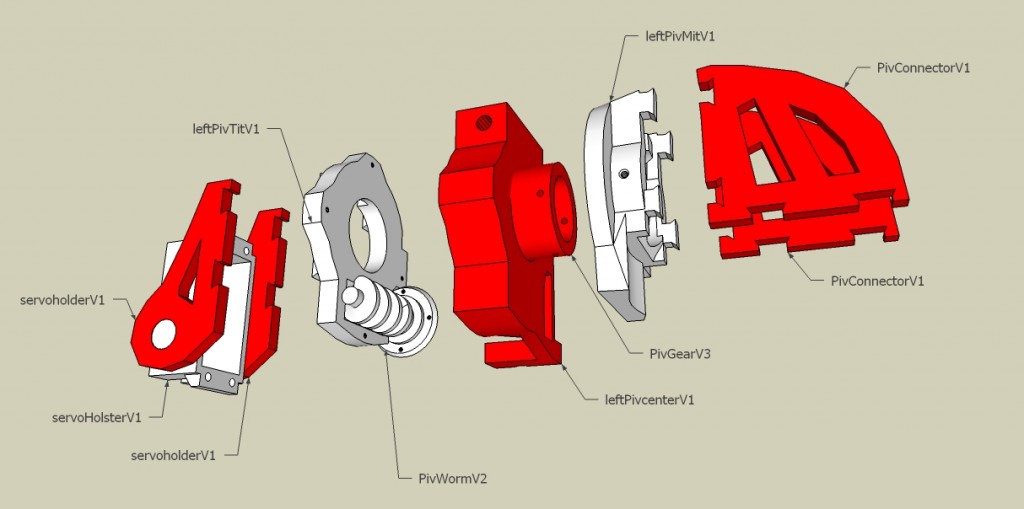
因此,保持相同的旋转角度,将“ rotmitV1”安装到“ rotgearV1”。(角度请不要参考这张图片,下载的部分不再相同)

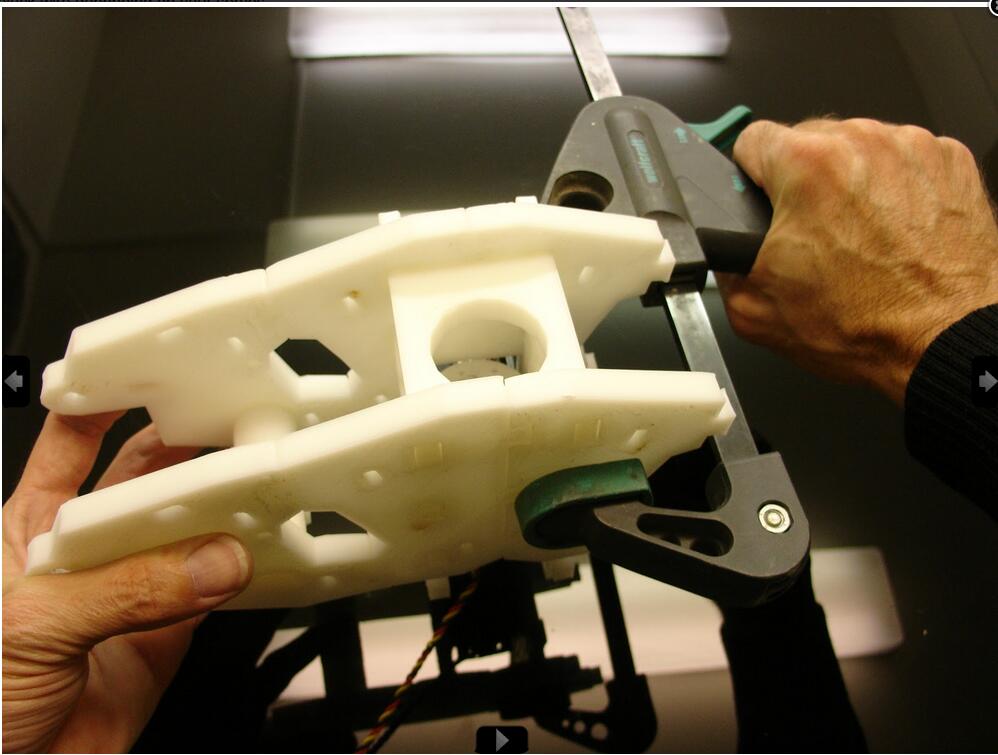
我使用夹具来确保在拧紧它们时所有三个零件之间不会产生间隙。确保您的螺钉没有掉出来,或将其重新切下。(角度请不要参考这张图片,下载的部分不再相同)
将一个伺服器连接到“ rotcenterV1”。为此,请执行以下操作:安装但不要拧紧白色致动器轮。
一旦安装了伺服器,就可以拧紧螺丝。
用4颗小螺丝将“ rotwormV4”安装到执行器上,确保它们不会从执行器后面掉出来,否则必须将其切开。将“ rotgearV2”安装到“ rotcenterV2”,它应该容易转动但没有间隙。我通过将伺服器插入Arduino使其旋转了几圈。然后我清理了零件产生的灰尘。在用“ rotTitV1”关闭外壳之前,在齿轮上的每个位置都使用大量的油脂。
如果要构建左旋转臂,则应按照与打开伺服器时相同的颜色顺序焊接电缆。
如果您要构建右旋转臂,则应按照与打开伺服器时相反的颜色顺序焊接电缆。

将电位计安装到“ rotpotentioV2”,但请确保将电位计上的小金属板放在“ rotpotentioV2”中设计的间隙中。使用小型伺服器上的一些备用螺丝。
PS:“ rotmitV2不应放在上面三张图片的左侧,因为您已经安装了它…
将“ pistonanticlockV1”缓和到“ pistonbaseV1”中。我在内部用金属棒加固了“ pistonanticlockV1”。但是您可以像这样使用它,它应该可以容纳。在测试期间,我打破了其中的一些,并且很高兴他们能代替其他东西打破。
注册会员后点击免费下载3D打印文件STL
上臂部分和肩膀部分

为啥文件我下载不了?