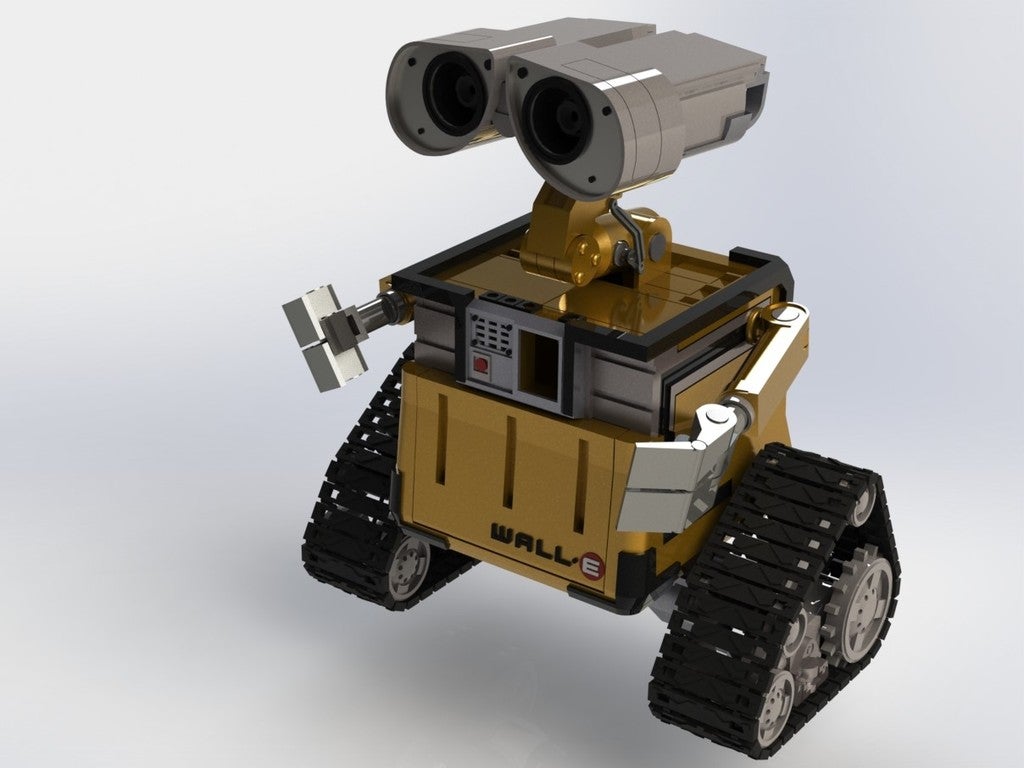
瓦力是电影《机器人瓦力》中的一个虚构角色,亦是该片的主角。他是一台虚构的型号为WALL-E(Waste Allocation Load Lifter Earth Class,地球版垃圾配置承载起重机)的机器人,后来一见钟情地喜欢上了新形异星植物探测女机器人伊芙(EVE,Extraterrestrial Vegetation Evaluator,但被瓦力叫做Eva 伊娃)。原本,“瓦力”是指影片虚构的特大型美国公司BnL(Buy n Large)生产的一系列清扫型机器人,但到了片中故事发生的年代,全世界的瓦力除了片中的这台外都已报废退役,故“瓦力”专指这最后的一台。
3D打印需要43个单独的文件、84个主要部分、72个踏板和144个管脚。总共有300个单独的部分需要打印。
- 每只眼睛都可以通过伺服电机独立升降。
- 每只眼睛都有空间增加一个小摄像头。
- 头部可以通过伺服电机左右看。
- 颈部在两个关节处启动,允许头部向上/向下看和升高/降低。
- 每只手臂的肩部都有一个马达,可以上下移动手臂。
- 手臂由压力配合关节、手和手指组成,可以手动设置姿势。
- 坦克踏板(防滑转向)是完全三维打印,可以使用两个12V直流齿轮电机供电。

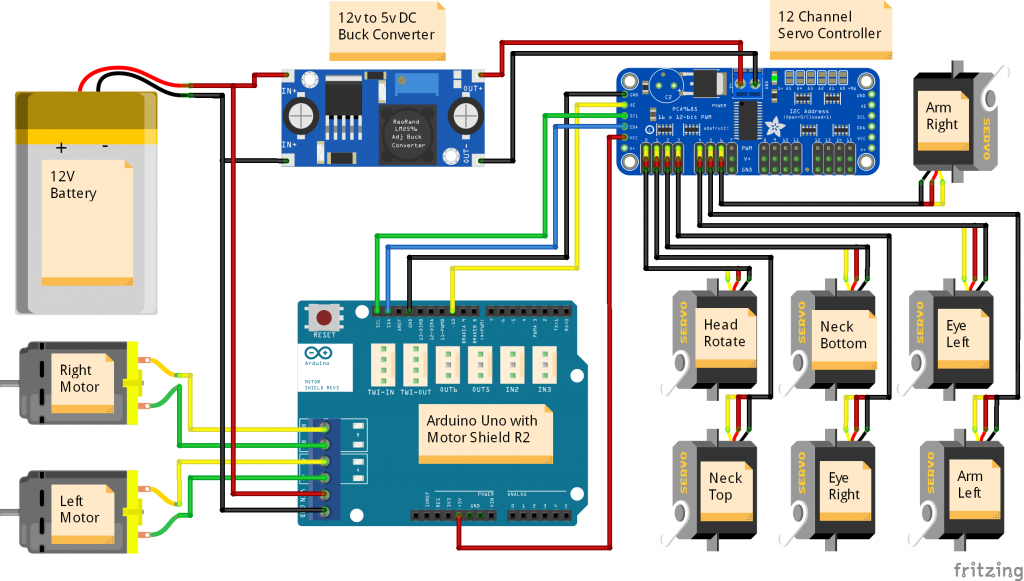
其他一些部件,用Arduino-Uno来控制,比如通过蓝牙芯片用手机控制,用扬声器让他发出噪音。但这里并没有特别的装备,所以只要你能把它放在身体里,你就会很好。所以你可以用你最喜欢的组件。
我还使用了8.5英寸的螺钉和螺母将其组装在一起,并专门为这些螺钉安装了零件。你大概需要30个螺丝。大多数情况下,螺丝会直接拧进塑料,你不需要螺母,但大多数地方有能力插入螺母,如果需要的话。由你决定。
组装机器人所需的硬件和电子设备列表有:
- (x14)M3螺栓-10 mm长
- (x12)M3螺栓-20 mm长
- (x2)M3螺栓-6mm长
- (x26)M3螺母
- (x3)回形针-用作连杆
- (x7)9g微伺服电机
- (x2)平凸透镜:31.5-32.5mm-用于眼睛
- (x2)12V直流齿轮电机-直径37mm,60RPM
- (x1)Arduino Uno或同等产品
- (x1) Arduino 电机驱动模块 Motor Shield R3
- (x1)16路12位脉冲宽度调制伺服驱动器-PCA9685
- (x1)12V直流电池组
- (x1)12V至5V直流降压转换器



注册会员后 最新升级改进版下载

WALL-E 2.0模型文件
控制源码能分享吗?
github搜索3d print walle
非常感谢分享!
非常感谢分享,大佬们都是在哪里找的代码啊。总不能自己从头来吧
github搜索3d print walle
请问这些有开源的代码吗??
真的非常感谢分享。
真不错
先感谢 不知道能不能提供打印服务
请问舵机是多大的,在哪可以买到
点哪个下载?
昨天注册的,下载不了文件,没权限,咋搞啊
感谢分享,学习一下
你好,如何才能下载?点击download link没有反应
真的太棒了,好喜欢
最新改进版有什么区别吗~~上面那个版本的修改时间更新一些?打印哪个版本好?
无法下载怎么办
下载不了?
能分享一下吗
受用
咨询一下~两个眼睛上舵机如何与中间轴连接?
还有boyun-k和boyun-l这两个部件是安装在哪!?
~谢谢!
可以给一下装配图吗
模型怎么分黄色灰色
可以自己配色,也可以参照成品图配色,自己打印的话怎么喜欢怎么来