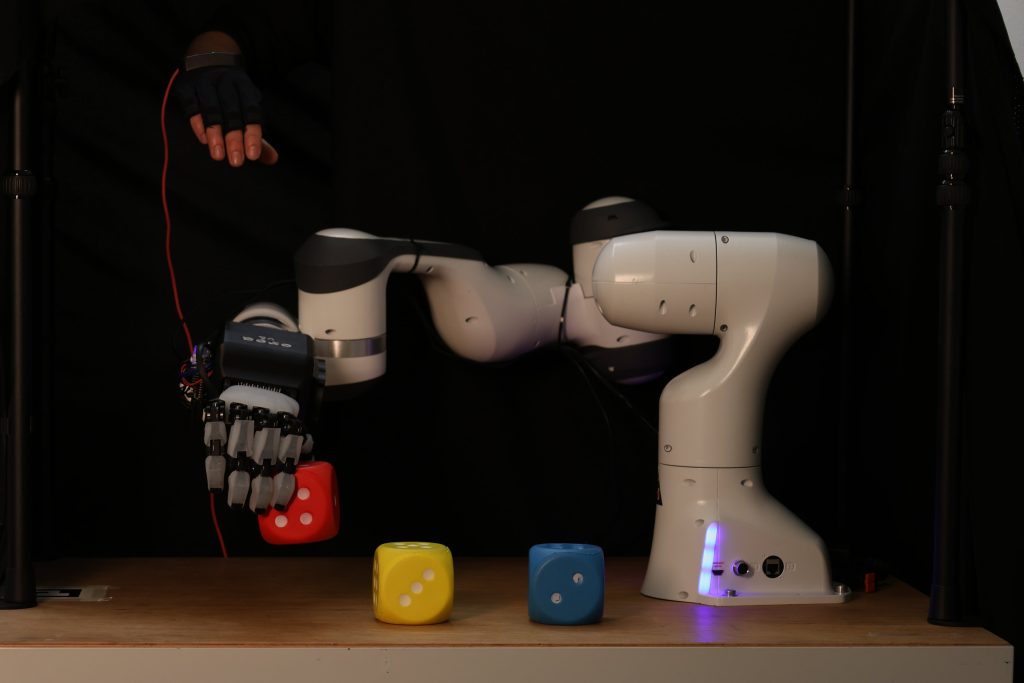
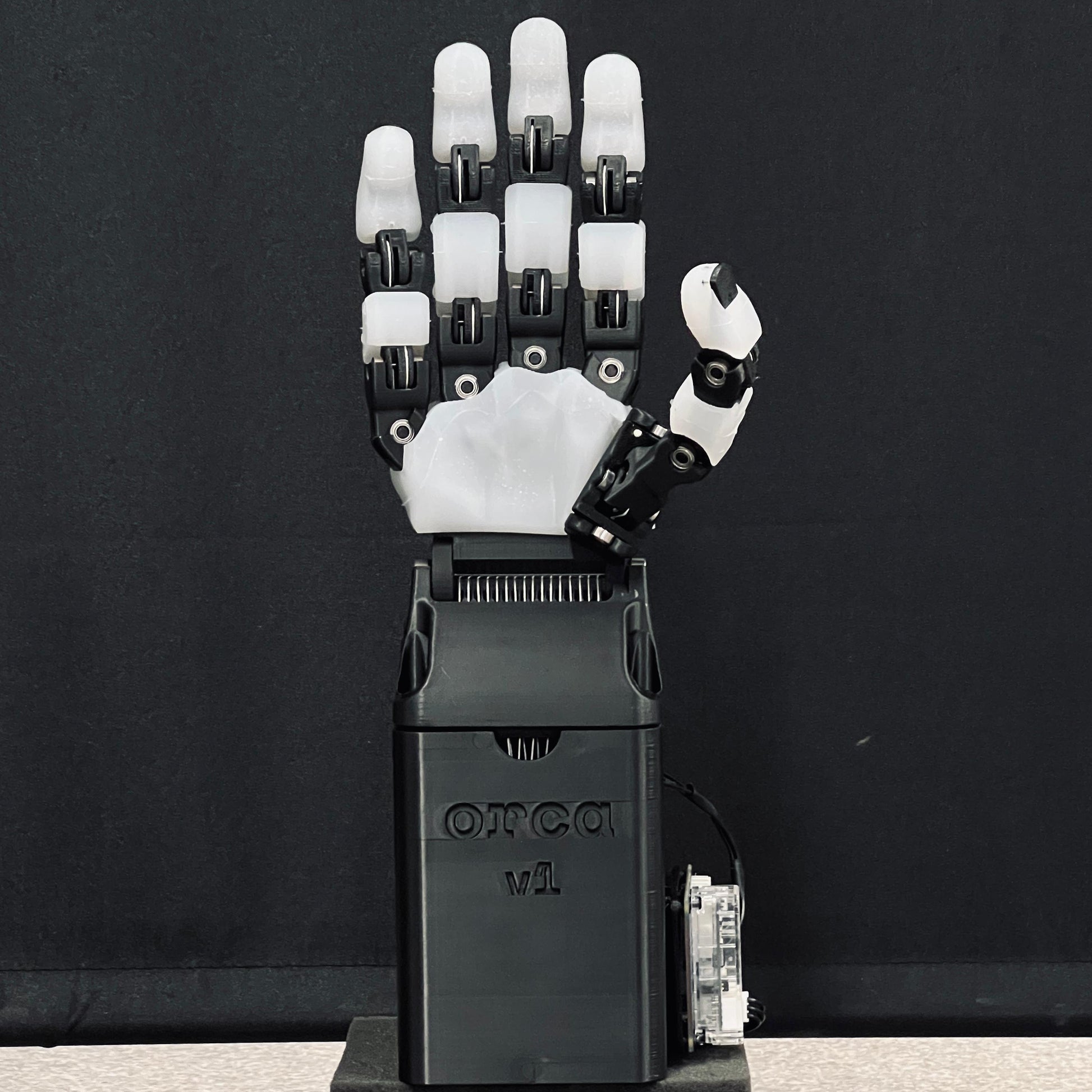
ORCA v1 手是一个由肌腱驱动的拟人机器人平台,旨在紧密复制人手的结构和运动。它具有17个自由度——手指16度,手腕1度——具备多种灵巧的操控任务。其设计平衡了功能、可靠性和可访问性。
Open-Source:开源:所有设计文件(STL)、控制软件、材料列表以及分步组装说明(包括视频)dashboard均可在我们的仪表板上公开使用。该项目旨在鼓励研究人员、教育工作者和业余爱好者进行复制、定制和实验。
Reliable:可靠:ORCA 手部包含多种设计选择,专注于坚固性和寿命。接头经过精心设计,可在过重负荷下安全拆卸,而非断裂,从而保护部件并简化维修。此外,通过每个接头旋转中心进行自动校准、低摩擦肌腱路由,以及模块化布局,有助于实现性能的一致性和长期可用性。
Cost-Effective:性价比高:这款手以3D打印设计为中心,总材料成本低于2000瑞士法郎。所有结构部件均可使用标准3D打印机进行打印,剩余的现成部件广泛可用,易于在线获取,确保了广大用户的可访问性。
Anthropomorphic:拟人化:专为与人手的比例和关节布局相匹配而设计,ORCA v1 包含可对立的拇指和动感手腕。它反映了人类的关节结构,包括MCP、PIP和ABD接头,使其能够与最初为人类使用而设计的日常工具和物体进行交互,并以类似人类的敏捷性执行广泛的操作任务。这种拟人化结构还显著简化了远程操作/重新定位,并有助于更直接地训练人手数据。这些功能共同构成了ORCA v1手柄在机器人技术以及以操控为重点的学习与开发中实践探索的实用且多功能的平台。

下载
ORCA_Fingers
ORCA v1 Hand 手指部分打印文件

ORCA_Tower
ORCA v1 Hand 手腕部打印文件
ORCA_Spools
ORCA_Spools
你好请问这个有sw模型吗,stl有装配体吗