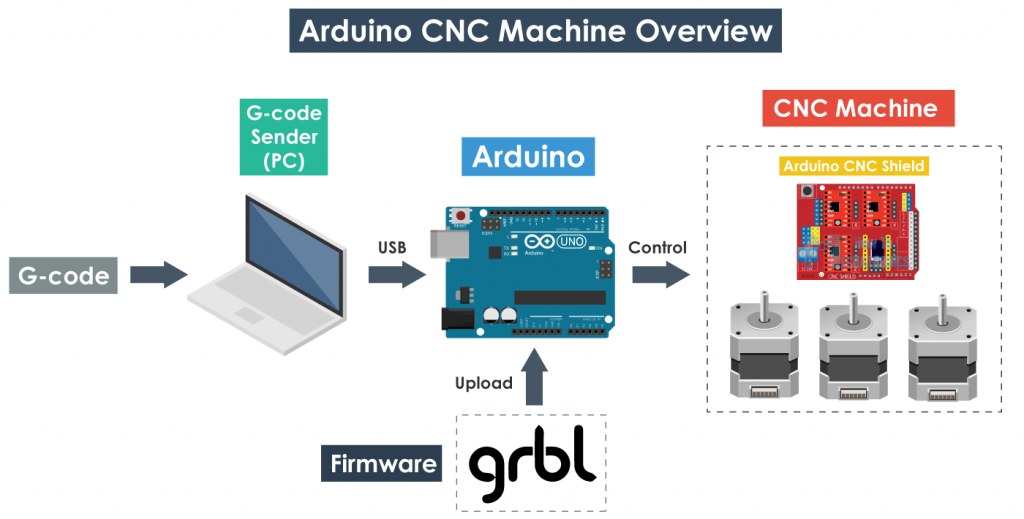
Grbl是一个免费的,开源的,高性能的软件,用于控制机器的运动,使东西,或使东西移动,并将运行在一个直接的Arduino。如果制造商运动是一个行业,Grbl将是行业标准。
大多数开源3D打印机的心中都有Grbl。它已经被用于数百个项目,包括激光切割机、自动手写器、钻孔机、涂鸦画家和古怪的绘图机。Grbl由于其性能、简单性和对硬件的节俭要求,已经发展成为一种小的开源现象。
2009年(http://bengler.no/grbl)通过编写并向每个人发布Grbl的早期版本(灵感来自Mike Ellery的Arduino GCode解释器),为开源社区增光添彩。自2011年起,Grbl将在Sungeun“Sonny”Jeon博士(@chamnit)的务实领导下,作为一个社区驱动的开源项目继续推进。
| 指令码 | 英文解释 | 中文解释 |
| $$ | View Grbl settings | 显示Grbl运行参数配置。 |
| $# | View # parameters | 显示一些特殊G代码需要的参数;有G54~G59的工作坐标偏移量、G28/G30预设置的坐标、刀具长度偏移量、探针偏移等。 |
| $G | View parser state | 显示此版本Grbl所有能够识别的特殊G代码。 |
| $I | View build info | 显示版本信息。 |
| $N | View startup blocks | 显示启动G代码,可以有多行。 |
| $x=value | Save Grbl setting | 设置Grbl参数并保存到Rom中。 |
| $Nx=line | Save startup block | 设置一条启动G代码指令并保存到Rom中。 |
| $C | Check gcode mode | 检测G代码的运行过程。 |
| $X | Kill alarm lock | 清除警告时的锁状态。 |
| $H | Run homing cycle | 三轴归位(必须使能限位功能)。 |
| ~ | Cycle start | 实时指令,重新开始运行。 |
| ! | Feed hold | 实时指令,进给保持。 |
| ? | Current status | 实时指令,返回当前的状态信息。 |
| Ctrl-x | Reset Grbl | 实时指令,Grbl复位。 |
Grbl参数配置说明
$0=10 (steppulse, usec) 步进脉冲时间,建议10us
$1=25(step idle delay, msec) 步进电机除能延迟时间
$2=0 (stepport invert mask:00000000) 步进电机驱动端口有效位掩码
$3=6 (dirport invert mask:00000110) 步进电机驱动方向位掩码
$4=0 (stepenable invert, bool) 步进电机使能取反有效位设置
$5=0(limit pins invert, bool) 限位IO口取反有效位设置
$6=0(probe pin invert, bool) 探针IO口取反有效位设置
$10=3(status report mask:00000011) 状态报告掩码
$11=0.020(junction deviation, mm) 节点偏差
$12=0.002(arc tolerance, mm) 圆弧公差
$13=0(report inches, bool) 位置坐标的单位设置
$20=0(soft limits, bool) 软限位开关
$21=0(hard limits, bool) 硬限位开关
$22=0(homing cycle, bool) 归位使能位
$23=1(homing dir invert mask:00000001) 归位方向位掩码
$24=50.000(homing feed, mm/min) 归位进给速率
$25=635.000(homing seek, mm/min) 归位快速速率
$26=250(homing debounce, msec) 归位边界反弹时间
$27=1.000(homing pull-off, mm) 归位点坐标离限位器触发点的距离
$100=314.961(x, step/mm) x轴速度转化参数 步/毫米
$101=314.961(y, step/mm) y轴速度转化参数 步/毫米
$102=314.961(z, step/mm) z轴速度转化参数 步/毫米
$110=635.000(x max rate, mm/min) x轴最大速率 毫米/分钟
$111=635.000(y max rate, mm/min) y轴最大速率 毫米/分钟
$112=635.000(z max rate, mm/min) z轴最大速率 毫米/分钟
$120=50.000(x accel, mm/sec^2) x轴加速度 毫米/(ss) $121=50.000(y accel, mm/sec^2) y轴加速度 毫米/(ss)
$122=50.000(z accel, mm/sec^2) z轴加速度 毫米/(s*s)
$130=225.000(x max travel, mm) x轴最大行程
$131=125.000(y max travel, mm) y轴最大行程
$132=170.000(z max travel, mm) z轴最大行程

新人小白,了解一下
哈哈哈哈哈,想下载
新人小白