在本教程中,我将向您展示如何组装非电动版本的支腿部件。如果正确地打印了打印件而又不翘曲,则非常容易,否则将很难将所有部件连接在一起。
请注意,其中一些零件确实很大,超过了标准的12x12x12厘米。
非电动支腿中包含两个非常大的部分,尺寸如下:
-ThighHighRightV1:LENGTH16,5 X WIDTH19,6 X HEIGHT12cm
-ThighHighTempV1:LENGTH19,7 X WIDTH12,7 X HEIGHT13cm
其中一些部件在3D打印期间需要支持,因此请检查波纹管列表。
在打印所有零件之前,应先打印CALIBRATOR,以检查零件是否可以装配在一起。如果很难将这些部件放在一起,则需要检查打印机校准设置。
填充物为30%,壁厚2.5mm,最好没有木筏,没有支撑物(除非特别说明),请使用帽檐以避免翘曲。
这是零件清单以及支脚所需的打印数量:
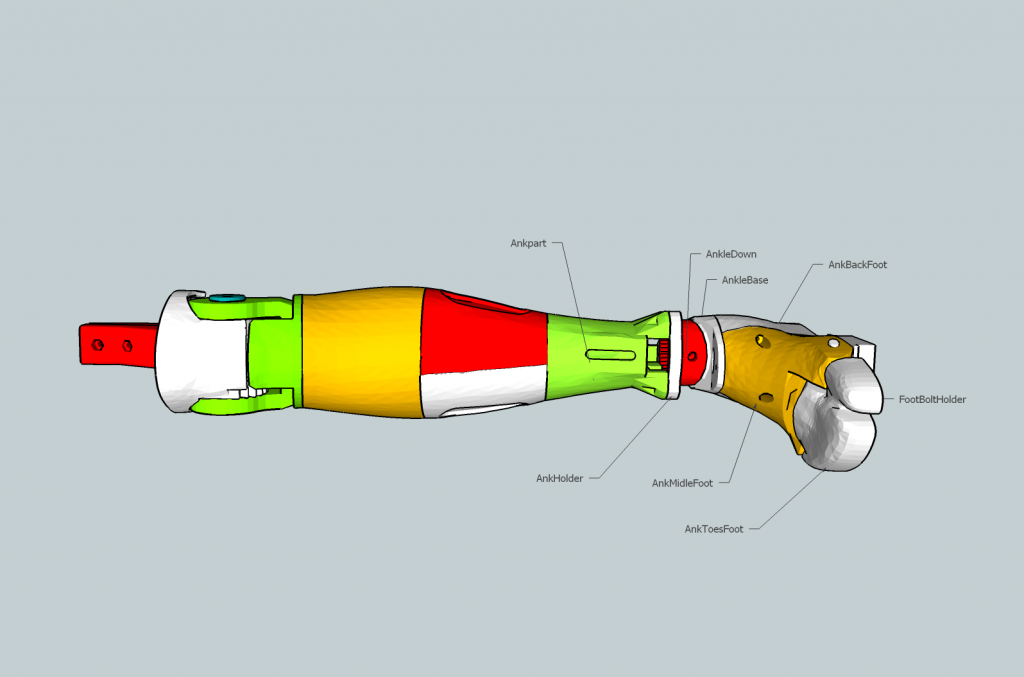
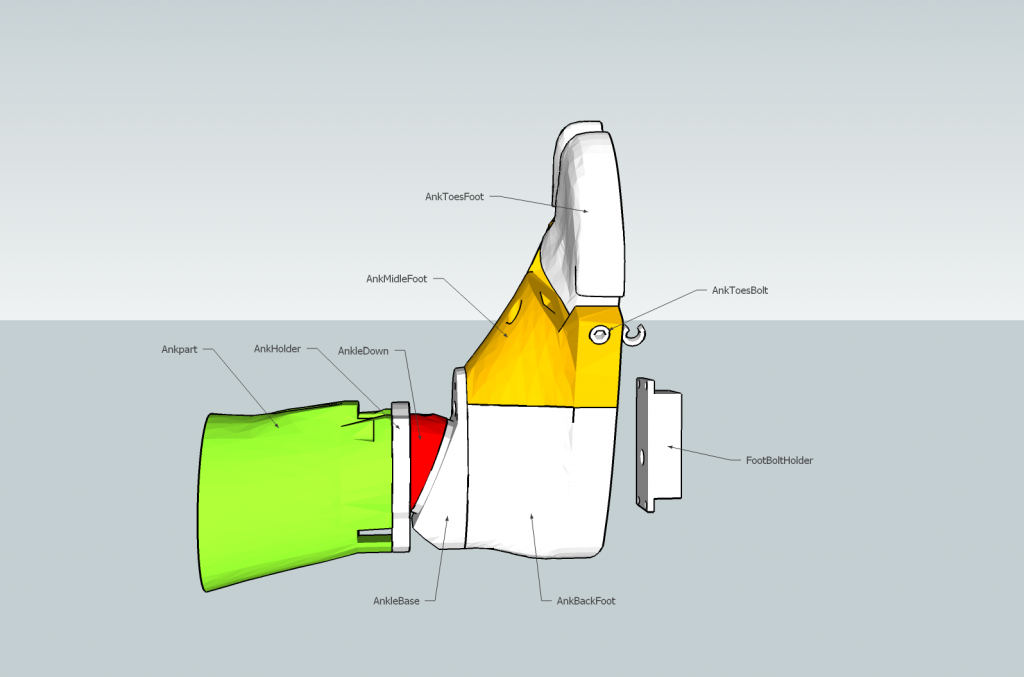
踝:
- 1x AnkBackFoot
- 1x AnkHolder
- 1个AnkMidleFoot(添加支持)
- 2x AnkToesBolt
- 1x AnkToesFoot
- 1个AnkleBase
- 1个AnkleDown(添加支持)
- 1个AnkpartV1
- 2个 FootBoltHolder
- 1x LeftAnkBackFoot
- 1x LeftAnkHolder
- 1个LeftAnkMidleFoot(添加支持)
- 1x LeftAnkToesFoot
- 1x LeftAnkleDown(添加支持)
- 1x LeftAnkpart
- 1x leftAnkleBase
胫骨:
- 1x TibiaHighLeft
- 1x TibiaHighRight
- 1x TibiaLowS1Left
- 1x TibiaLowS1Right
- 1x TibiaLowS2Left
- 1x TibiaLowS2Right
膝盖:
- 2x KneeBolts
- 2x KneeSmallBolts
- 1x KneeClampLeft
- 1x KneeClampRight
- 1x KneeHighLeft
- 1x KneeHighRight
- 1x KneeLowLeft
- 1x KneeLowRight
大腿:
- 1x LegFixerLeft
- 1x LegFixer
- 1x LegHolderLeft
- 1x LegHolderRight
- 1x ThighBoltBlokerL
- 1x ThighBoltBlokerR
- 1x ThighHighBlokerL
- 1x ThighHighBlokerR
- 1x ThighHighLeft
- 1x ThighHighRight
- 1x ThighHighTempLeft
- 1x ThighHighTemp
- 1x ThighLowLeft
- 1x ThighLowRight
- 1x ThighMidLeft
- 1x ThighMidRight
- 1x ThighSideAccessLeft
- 1x ThighSideAccessRight
非机动腿主要用于表演。他们允许机器人站立在自己的腿上。机器人将通过螺栓固定在60x60cm的大板上,以确保其稳定性。
10mm的杆将从底板一直延伸到腿的顶部。
注册会员后 点击免费下载3D打印文件

inmoov 下身腿脚部分模型文件