AmazingHand 是一个开源的 3D 打印仿人机械手项目,旨在为机器人研究、教育和开发提供一种低成本、轻量化的解决方案。该项目打破了传统高性能机械手价格昂贵、结构笨重的壁垒,其核心设计全部可 3D 打印,且无需依赖外部前臂驱动器。
关键特性与规格
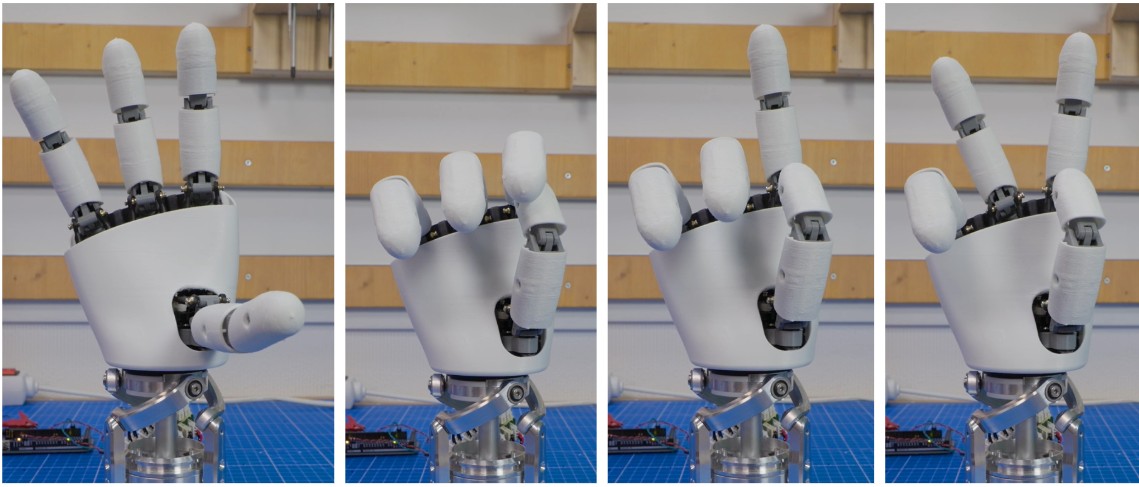
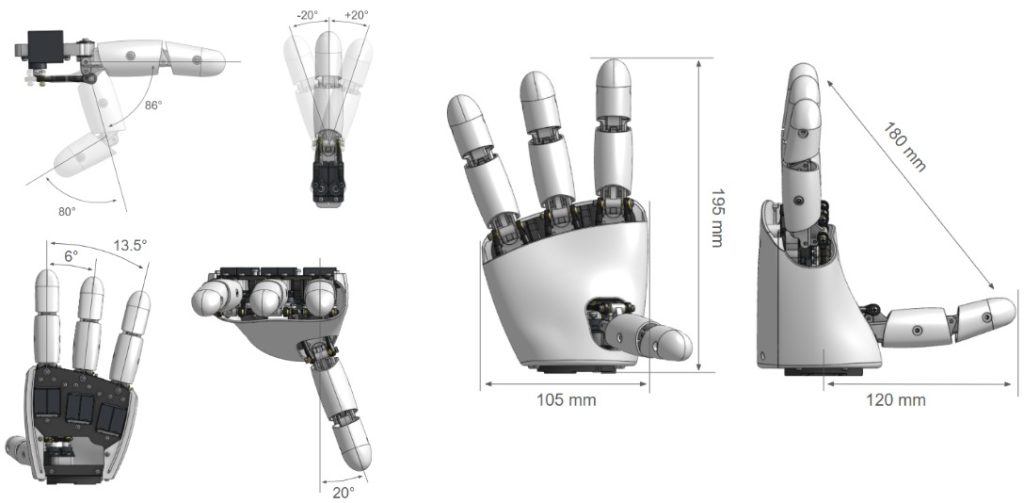
自由度与结构:拥有 8 个自由度(8-DOF),配备四根手指,每根手指由两个并联的舵机驱动,可独立实现屈伸(弯曲)和内收/外展(左右移动)两种运动。
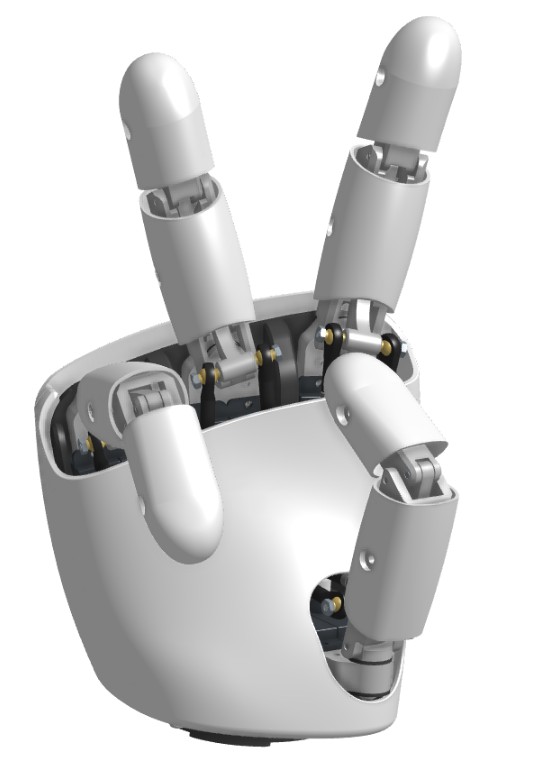
驱动与设计:所有执行器(8 个 Feetech SCS0009 舵机)均集成在手掌内部,通过差动电机运动实现手指控制,无需线缆,结构紧凑。
材料与重量:骨骼结构采用刚性 3D 打印材料,表面覆盖柔性 TPU 外壳,既保证了强度,又提升了抓握的安全性和顺应性。整只手重量约为 400 克。
成本与开源:材料成本低于 200 欧元,项目完全开源,机械设计采用 CC BY 4.0 许可证,代码采用 Apache 2.0 许可证。
兼容性:腕部接口专为 Reachy2 机器人设计,但可轻松适配其他机械臂平台。
设计灵感来自ILDA手,采用双舵机驱动每根手指,实现屈伸与外展内收。骨骼结构坚固,表面覆盖柔软TPU壳,既保证力量又保护握持物。大拇指可与食指对拢,掌部柔性设计提升抓握适应性。
目前,“Amazing Hand”可直接装配到7自由度的Reachy2机器人上,CAD文件开源,支持自由定制和适配其他机械臂。基于简单摄像头的手部追踪系统已实现,可用逆运动学与QP算法精准控制手指动作。
项目完全开源,包含BOM清单、3D打印文件、组装指南和示例程序,地址:github.com/pollen-robotics/AmazingHand。欢迎开发者自由改造:增添第五指、调整手指比例、替换腕部接口、植入传感器……让这只机械手更强大,更个性化。
这是一次低成本、高性能机械手的突破,推动类人机器人走向普及与创新。期待更多创意碰撞,助力机器人更灵巧、更智能!
AmazingHand 是一个开源的 3D 打印仿人机械手项目,旨在为机器人研究、教育和开发提供一种低成本、轻量化的解决方案。该项目打破了传统高性能机械手价格昂贵、结构笨重的壁垒,其核心设计全部可 3D 打印,且无需依赖外部前臂驱动器。