这是一个名为“APC-1”的搜救步行机器人项目。嗯,当然不是真的。这只是我的概念,我对这样一个机器人如果存在于现实中的样子的看法。但是,正如您所看到的,这不是一个装饰模型,而是一个可以用自己的双手组装的成熟的遥控步行机器人。

我使用了两条细丝来打印部件:坚固且轻便的碳填充尼龙(黑色部件)和聚碳酸酯和 ABS 塑料的混合物(PC\ABS,涂漆部件)。如果您也决定使用工程长丝,那么我建议您只使用碳填充尼龙。PC\ABS成本相同,但印刷难度更大,在层烧结方面也不比传统ABS好多少。另外,这种灯丝很重,它的密度似乎比PLA还要高。此外,碳填充尼龙可以很容易地打磨和涂漆。我的机器人重 1800 克,所以如果你用普通的 PLA 打印所有部件,那么机器人会变得更重一点,没关系。腿尖印有橡胶状灯丝,侧面光扩散器带有半透明灯丝。

在这里,您可以找到可定制的配电板(Gerber_Servo PDB x6、Gerber_Fan Light)的所有组件、所有 3D 模型、固件和设计的列表。但这根本不是必需的,电路板非常简单,可以由标准面包板制成。
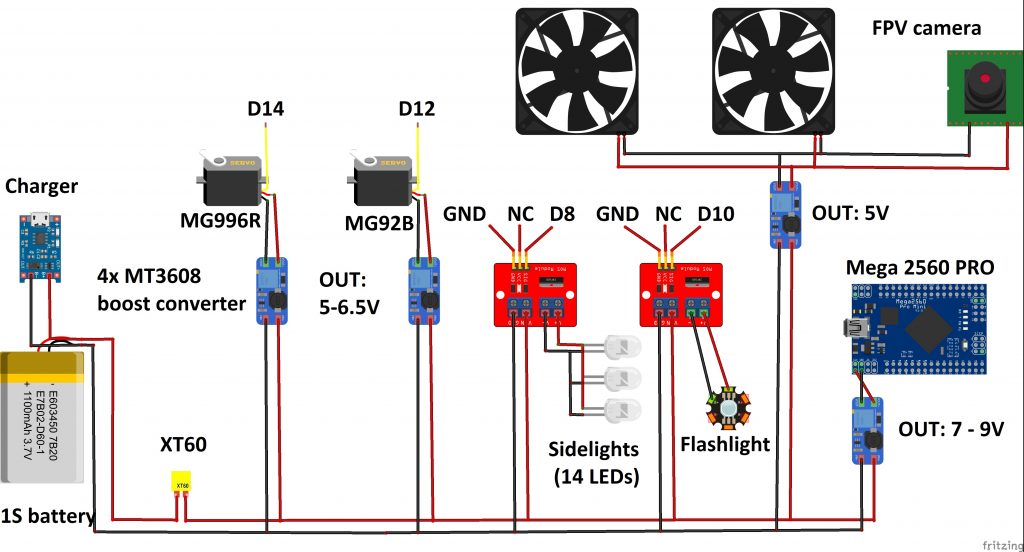
通常,这些步行机器人由 2S、3S 或 4S 电池通过降压转换器供电。在这里,作为实验,我尝试组装基于 1S 电池和升压转换器的电源系统。这样的电池对于我的下一个机器人来说绝对是必不可少的,所以我决定在这里尝试一下。但是您可以使用带有一个强大的 20 Amp 降压转换器的标准 2S 电池系统来为所有伺服系统供电。
在最快的步行模式下,机器人消耗 10-12 安培,+ 2 安培用于侧灯、手电筒和 FPV 摄像头。这意味着这里安装的 8 Ah 电池将持续大约 30-40 分钟,这是至少。

组件列表:
19x 原装 MG92B – http://ali.pub/53ndy7
1x 原装 MG996R – http://ali.pub/5b88a1
1x FPV Camera RunCam Split 3 – http://ali.pub/510vnp
1x VTX – http://ali .pub/5b897v
1x Arduino 2560 PRO 控制板 – http://ali.pub/510vuw
3x 6 Amp Boost Converters – http://ali.pub/5b88w7
4x 2 Amp Boost Converter – http://ali.pub/5cpmee
2x 电池 21700 – http://ali.pub/5b8abc
1x 带接收器的 PS2 游戏手柄 – http://ali.pub/5cp8fd
LED – http://ali.pub/5cp7r9
6x 黄色
6x 红色
2x 白色
14x 100 欧姆电阻器( LED) – http://ali.pub/5cp7ww
4x 伺服驱动器配电板 – 定制
1x 头部配电板 – 定制
2x 电源键(mosfets) – http://ali.pub/5b8ahy
1x 充电指示灯 – http://ali.pub/5b890o
2x Cooler 4010 – http://ali.pub/5b8drz
碳管(5x3x400 毫米) – http://ali.pub/5b8bxa
18x 轴承 MF63ZZ(3x6x2.5 毫米) – http://ali.pub/53o9wx
1x头戴式轴承( F604zz) – http://ali.pub/5cpa6d
30x 笼式螺母 \ 衬套 (M3x6) – http://ali.pub/4suuwh
36x 螺丝 M2x8 – http://ali.pub/49vq4i
36x 螺母 M2 – http:// /ali.pub/49vq1e
螺丝 m3 –
1x XT60 连接器 – http://ali.pub/5cpai8
JST 连接器 – http://ali.pub/510ugc
电线:
细 – http://ali.pub/5b89fg
16 AWG –
20 AWG –
尼龙编织物:
8mm –
5mm ——
注册会员后免费下3D打印文件 和 控制程序源码

搜救步行机六足机器人APC-1模型
不能下载啊
同样问题,不能下载