
如果您想构建一个六足机器人(或者只是对机器人技术感兴趣),那么这个六足蜘蛛机器人绝对酷毙了,既然你在这里,不妨告诉你他的设计最重要的特点:
- 便宜:成本1200元左右
- RGB:271 个单独的 RGB LED 供您随意调节
- 电缆管理:电缆在腿内布线。没有可能缠结的电缆环
- ORP兼容:与开放机器人平台模块兼容
- 蓝牙控制:通过手机应用程序远程控制
这个构建绝对不是一件容易的事。但一旦完成,就会非常有收获。
所需材料

螺丝:
- M2(内六角圆头)6mm*8
- M3(内六角圆头)10mm*12
- M3(内六角圆头)14mm*12
- M3(内六角圆头)20mm*6
- M3(内六角圆头)30mm*12
- M3(沉头)6mm *4
- M3(沉头)10mm *4
- M5(沉头)10mm*30
- M3螺母(方型)*48
- M3 注塑内嵌螺母 (OD 5) 5mm *53
- M5 注塑内嵌螺母 (OD 7) 5mm *42
电子产品:
- STM32…C8T6(BluePill)*1
- HC-05(蓝牙模块)
- PCA9865(伺服驱动器)*2
- XL4016E1(降压转换器)*1
- XL6009(蓝金)*1
- LED环60*1
- LED环16*1
- LED环8*1
- LED灯带 144LEDs/m *2
- 18650电池*4
- HX-2S-JH20 *1
- MGN996舵机*18
- XT60母头*1
- XT60公头*1
- 电线(16awg、20awg、信号线、屏蔽线)
您还需要一个 ST-Link(或其他一些编程器)和一部电话。
对我来说,所有东西加起来(不包括运费)花费了我大约 1200元,但这可能会根据你购买的地点、时间和方式而有很大差异。
第一步:打印
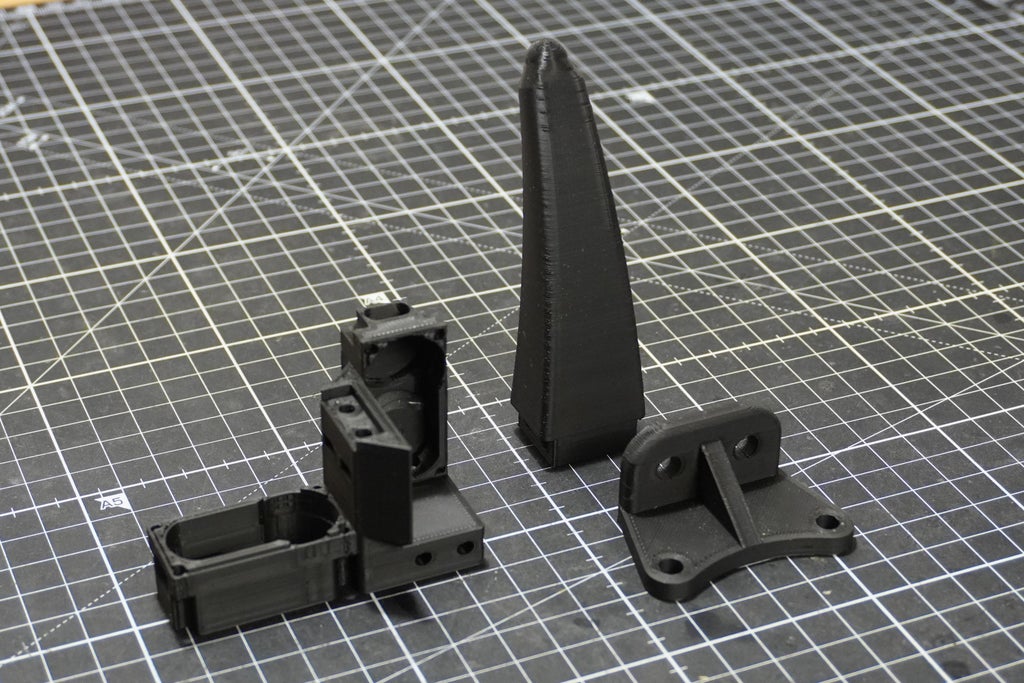
以下是您需要打印的所有部分。一切都以正确的方式进行,并在必要时添加了支撑。一切的设计都是为了尽可能减少支撑。
除了leg_set 和leg_set_mirrored 需要打印3次之外,其他所有内容都打印一次就可以了。
一些身体部位占据了整个构建区域,因此您需要一个调平的构建板,甚至需要更好的网床调平。我没有,但效果仍然很好。
对于套管组,您需要尝试不同的 XY 补偿值。这些衬套需要为每个接头增加一些阻力,以减少颤动。
我打印了设置三层外壳和 10% 的填充。
第二步:构造腿部和身体
一旦你拥有了所有的部件,你就可以开始建造腿了。我没有关于腿部或身体的详细构建说明,但您可以观看我的两个视频的构建编译,并查看组装的 3D 模型。
我强烈建议首先构建一条单腿进行一些练习,同时也为衬套找到正确的值。如果它们太松,腿就会发出很多声音。如果它们太紧,腿就根本无法移动。一般来说,伺服系统移动的质量越大,它需要的阻力就越大。
还要确保在构建腿之前将每个伺服器归零。建造时确保每个接缝形成 90° 角。腿部的弯曲使这变得更加烦人。
这是确保每条腿的 IK 系统正常工作所必需的。如果这甚至稍微偏离(而且确实如此),您将必须尝试不同的偏移值(在“output.cpp”中)来为每条腿拨入该值。
第三步:接线
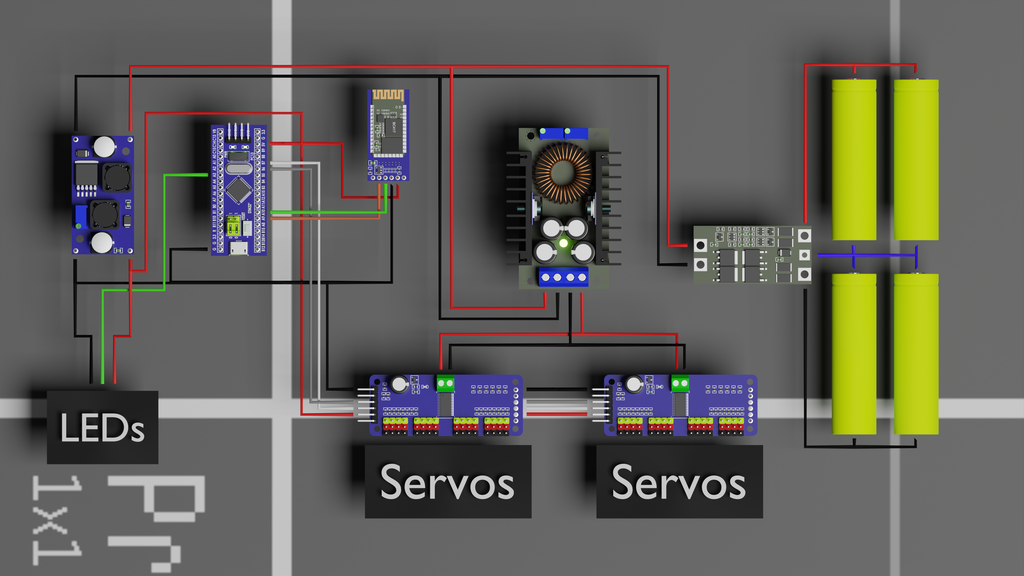
像上面的接线图一样连接所有东西。如果分辨率不够可以在GitHub上找到图片。STM32与伺服驱动器之间的连接请务必使用屏蔽线。如果没有它,我会遇到一些干扰问题。
这里缺少的一件事是电池和电路其余部分之间的 XT60 连接。您需要一种方法来关闭六足位移台。
LED 全部按以下顺序串联:眼睛中心、眼睛中环、眼睛外环、底环、腿[(右前)根部 -> 尖端(顺时针方向)
对于伺服系统,您可以将它们连接到最容易的地方。但是,您需要在“output.cpp”文件中正确设置每个伺服器的通道。
在该节点上,确保桥接其中一个伺服驱动器上的第一个焊盘。这将确保它使用不同的 I2C 地址。第二个驱动程序将继续第一个驱动程序的通道编号 (16-31)。
第四步:编程
该代码是用带有平台 IO 扩展的 Visual Studio Code 编写的。我无法在此处上传这些文件,因此您必须从GitHub下载它们。
要上传它,请确保您已安装并将以下文件夹添加为项目。
从这里上传代码。请务必为此使用 ST-Link。您可以使用简单的 FTDI 编程器或类似的工具,但您必须拔下蓝牙模块才能连接它,并将 platformio.ini 文件中的“upload_protocol”从“stlink”更改为程序员所需的内容。查看此处了解更多信息。
[env:genericSTM32F103C8]
平台 = ststm32
板 = genericSTM32F103C8
框架 = arduino
debug_tool = stlink
upload_protocol = stlink
lib_deps =
adafruit/Adafruit PWM 伺服驱动程序库@^2.4.1
fastled/FastLED@^3.6.0
如果您想停用某些功能,例如 LED,出于某种原因,您可以在“header.h”文件中通过注释掉您不需要的功能来实现。这对于测试新功能非常有用。
第五步:安装远程应用程序
安装以下应用程序。您将收到一条消息,指出安装此软件可能存在危险。这是正常现象,所以不用担心。如果您不相信我,请查看GitHub上的 MIT App Inventor 项目文件并自行编译。
安装后,请确保允许“附近的设备”。这是应用程序查找可用蓝牙设备所必需的。
请注意,有用于控制六足位移台 LED 的滑块,但目前已禁用该滑块以减少延迟。
第 6 步:连接到六足位移台
剩下要做的唯一一件事就是连接到 Hexapod。
打开 Hexapod 并与手机蓝牙设置中的蓝牙模块配对(仅执行一次)。默认密码为 1234 或 0000。
完成后,打开 Hexapod Remote 应用程序并连接到蓝牙模块。
连接后,六足机器人将有一个简单的启动动画,现在您可以使用两根操纵杆控制六足机器人,有点像无人机。
第七步:欣赏你的作品
看到项目工作对我来说是最有成就感的事情。我知道大多数人不会构建如此复杂的东西,但我仍然希望我能够激励您构建自己的机器人项目。
如果您有任何问题或建议,请随时给我写评论。
制作愉快:)